






| Bouwer | : | Arnoud van Delden |
| Model 1 | : | Wagentjes met Arduino-aansturing |
| Model 2 | : | Lemniscaat |
Model 1 : Wagentjes met Arduino-aansturing
Beschrijving:
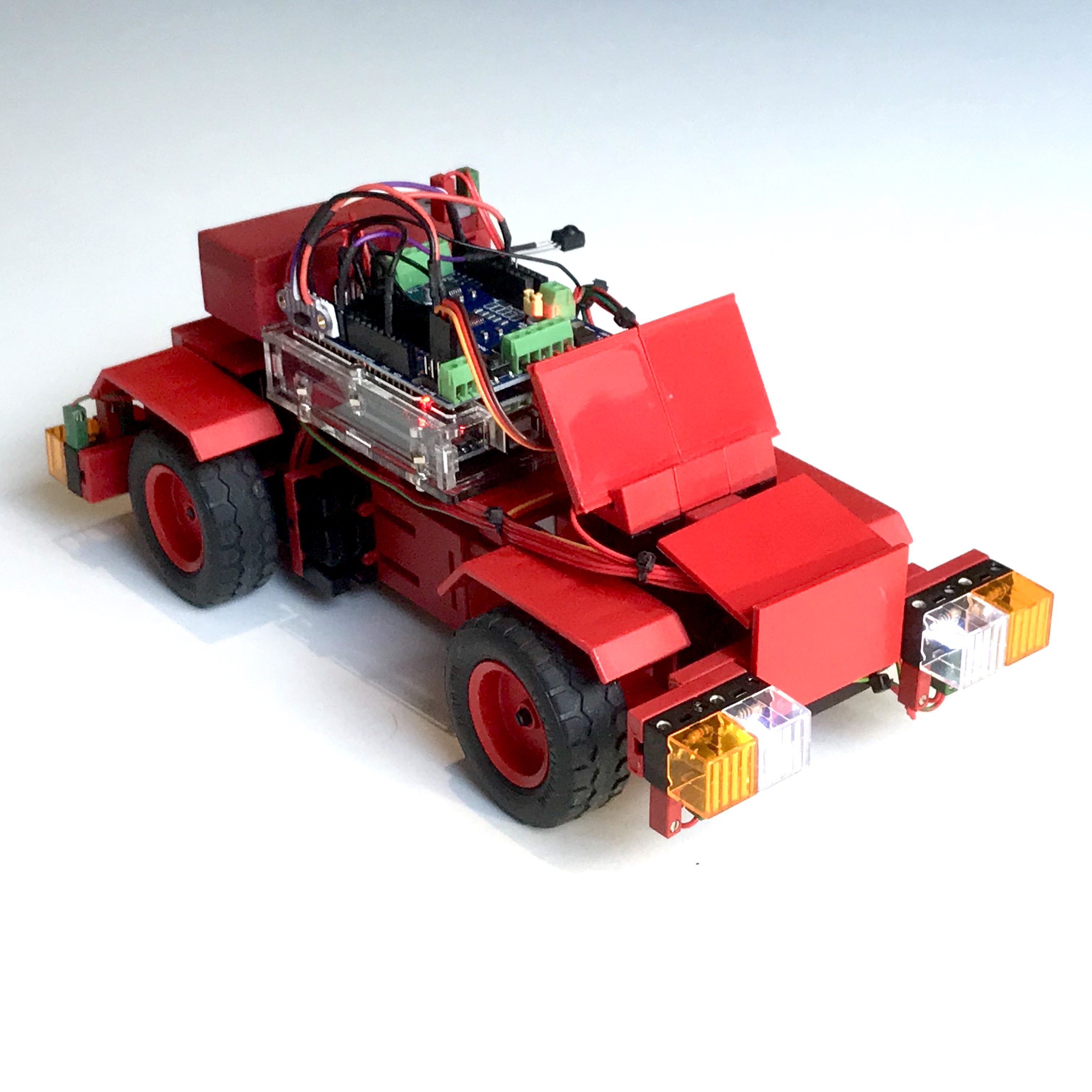
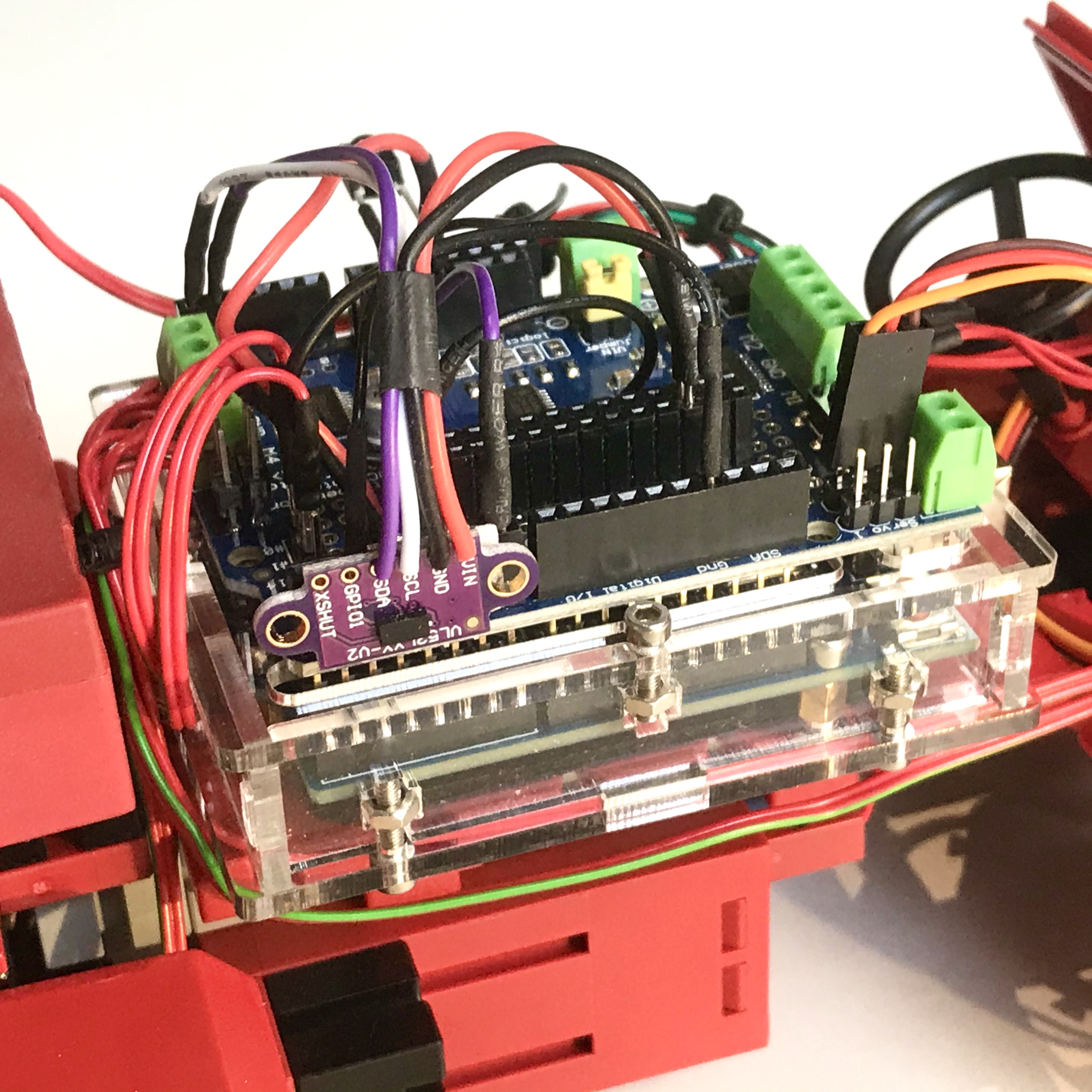
De afgelopen tijd heb ik me laten inspireren door het boek ‘fischertechnik®-Roboter mit Arduino’, waarin fischertechnik gebruikt wordt om modellen te maken die worden aangestuurd of geprogrammeerd met een z.g. Arduino microcontroller i.p.v. de fischertechnik-eigen TXT controller. Ik bouwde twee voertuigjes en experimenteerde met de aandrijving, de sensoren en de besturing. Voor de aansturing van deze voertuigjes gebruik ik nu een combinatie van een Arduino Uno met een z.g. motorshield voor het uitlezen van de sensoren en het aansturen van de motoren en LEDs.
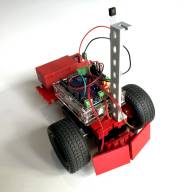
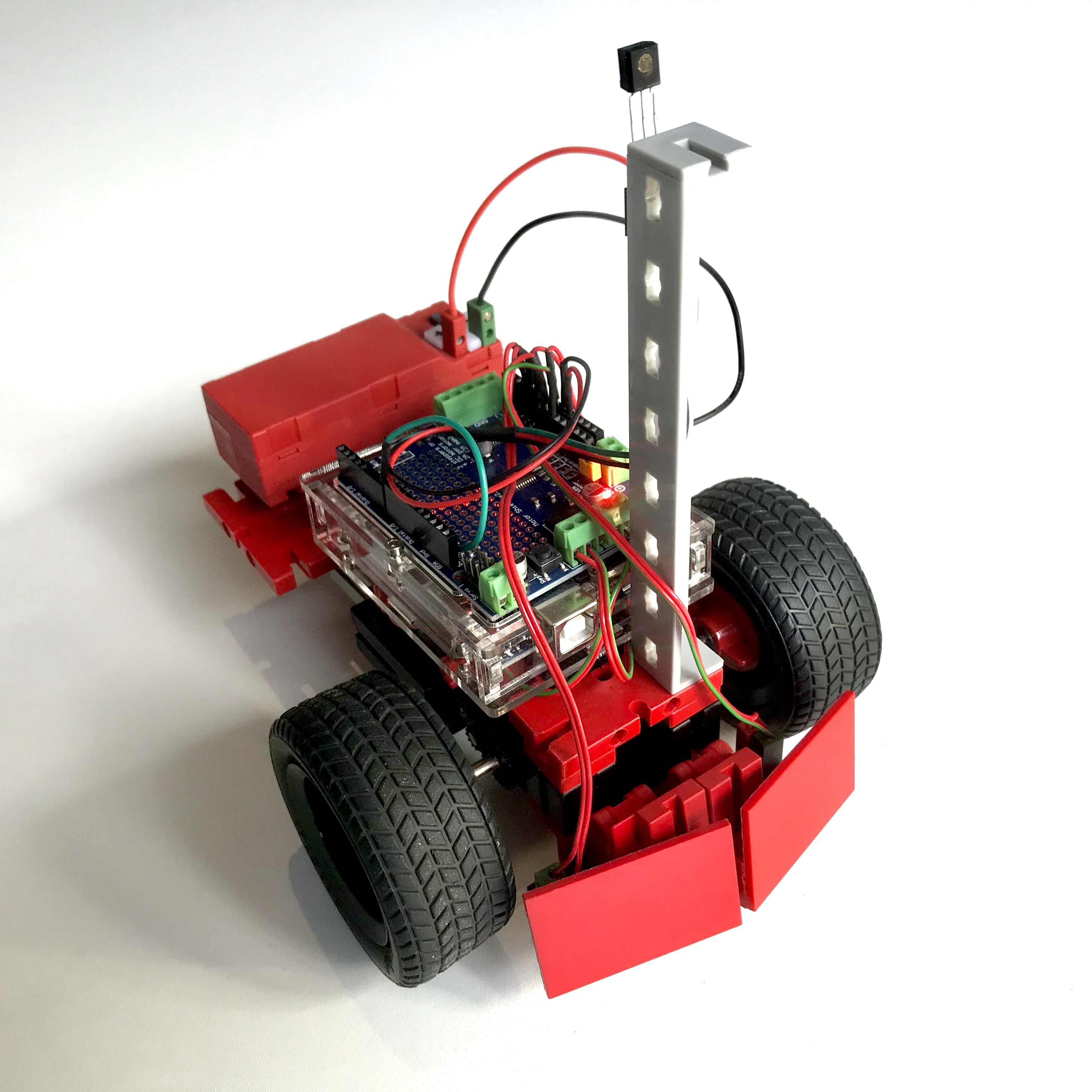
De buggy kan bochten nemen door snelheidsverschillen tussen de twee wielen. Door de draairichting van de wielen tegengesteld te maken kan hij op zijn plek draaien en rijdt hij zich niet snel vast. Er is al getest met schakelaars in de bumpers en een infrarood afstandssensor voor het ontwijken van objecten. Uiteindelijk zou je er zelfs een Pixy-camera-module met patroonherkenning op kunnen zetten.
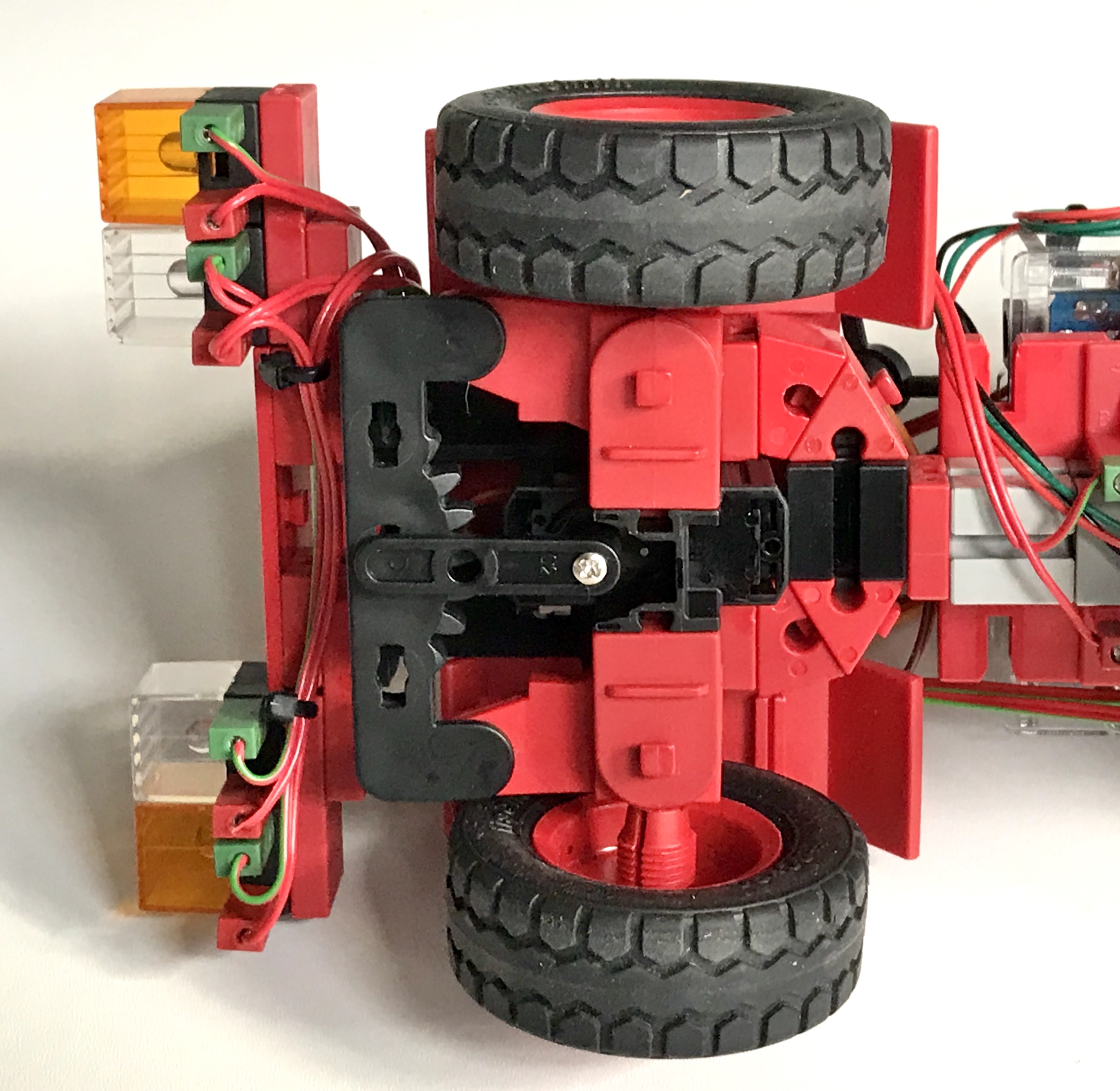
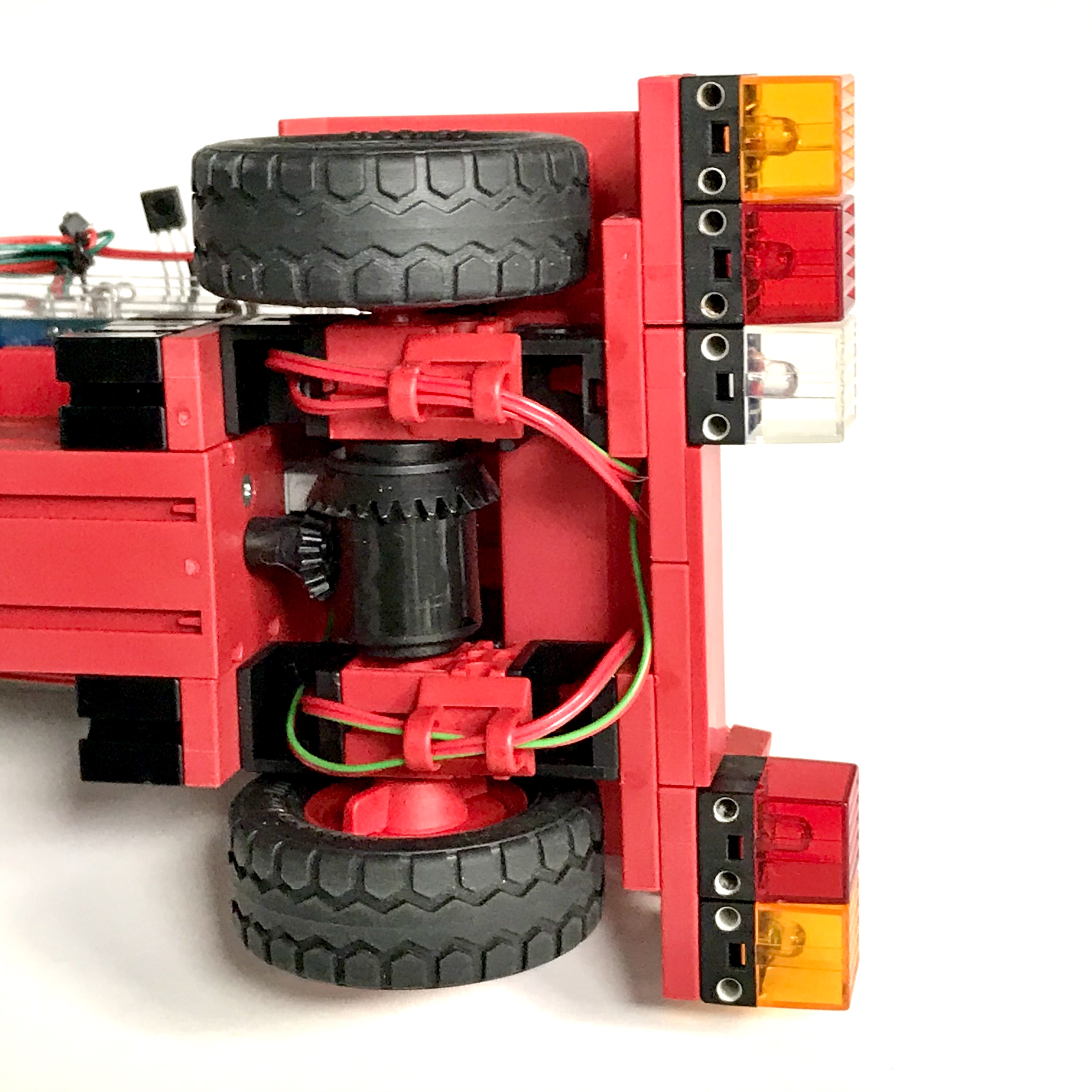
Het andere wagentje stuurt meer als een normale auto, met de aandrijving op de achteras en servo-bestuurde voorwielen. Het was een leuke uitdaging eerst zelf genoeg LEDjes met voorschakel-weerstand te solderen in fischertechnik lichtsteentjes (want ik had er niet voldoende en nog wel vrij veel heldere LED’s liggen) en daarna de aansturing van de verlichting zo compleet en ‘echt’ mogelijk te maken. De richtingaanwijzers gaan nu netjes met de sturing mee. Bij het afremmen of stoppen, lichten de remlichten op. Bij het achteruit rijden, gaat vanzelfsprekend het achteruitrijlicht aan.
Er valt voorlopig nog genoeg mee te prutsen om de winter-lockdown door te komen. Er borrelen diverse ideeën op; bijvoorbeeld een MP3-player module met (ouderwetse) toeter-geluiden. Of met behulp van de tacho-pulsen van de encodermotor en de laser-afstandssensor (VL53L0X, reeds aan de zijkant gemonteerd) het autootje automatisch te laten inparkeren tussen twee objecten. Ook zijn er nog diverse alternatieven voor de afstandsbediening (nu infrarood met TSOP4838) uit te knobbelen, dus deze twee modelletjes zullen zeker nog dienen voor vele vervolgexperimenten.
Foto's
 |
 |
 |
 |
 |
|
Video's |
||||
|
|
||||
Beschrijving:
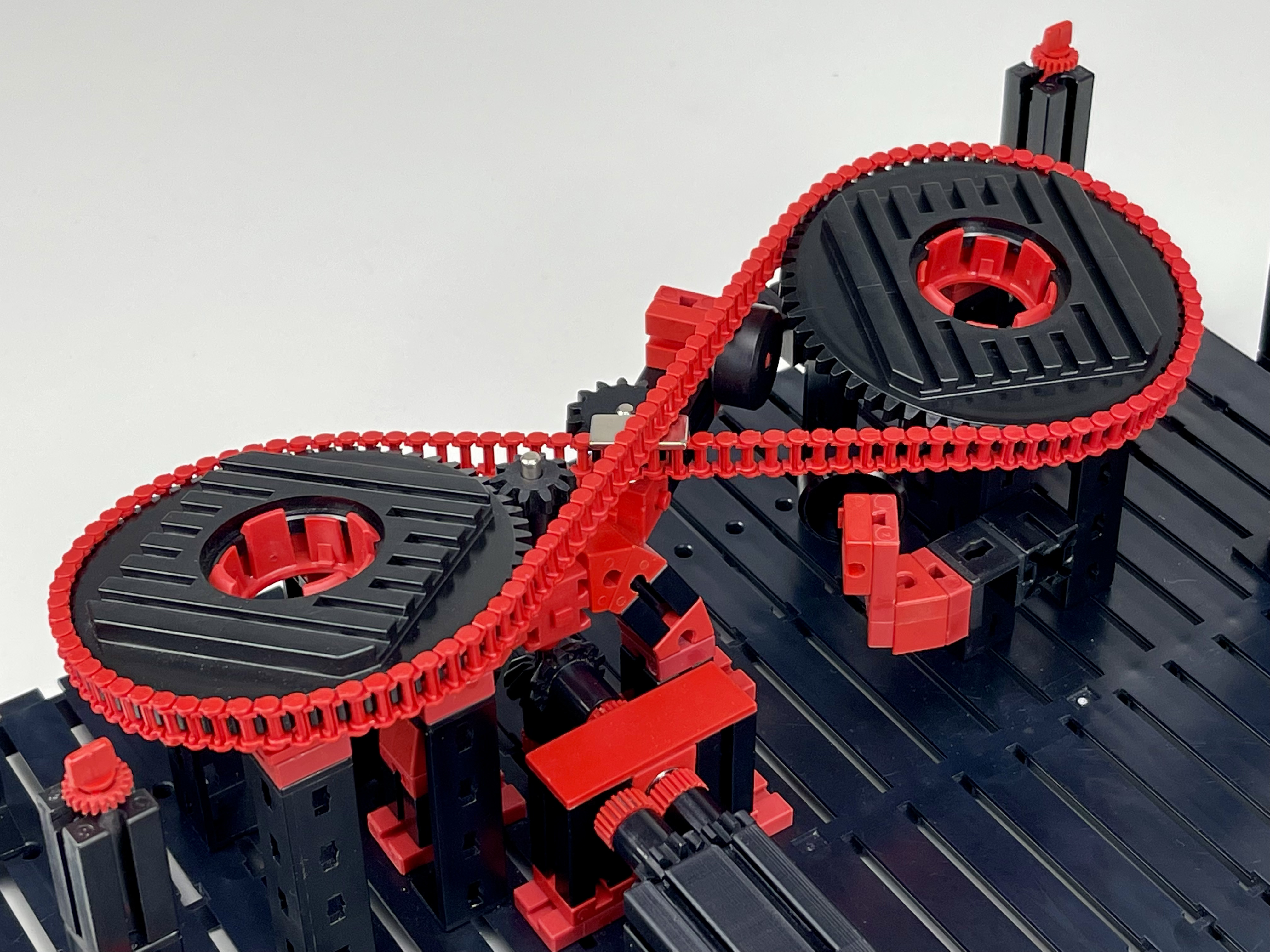
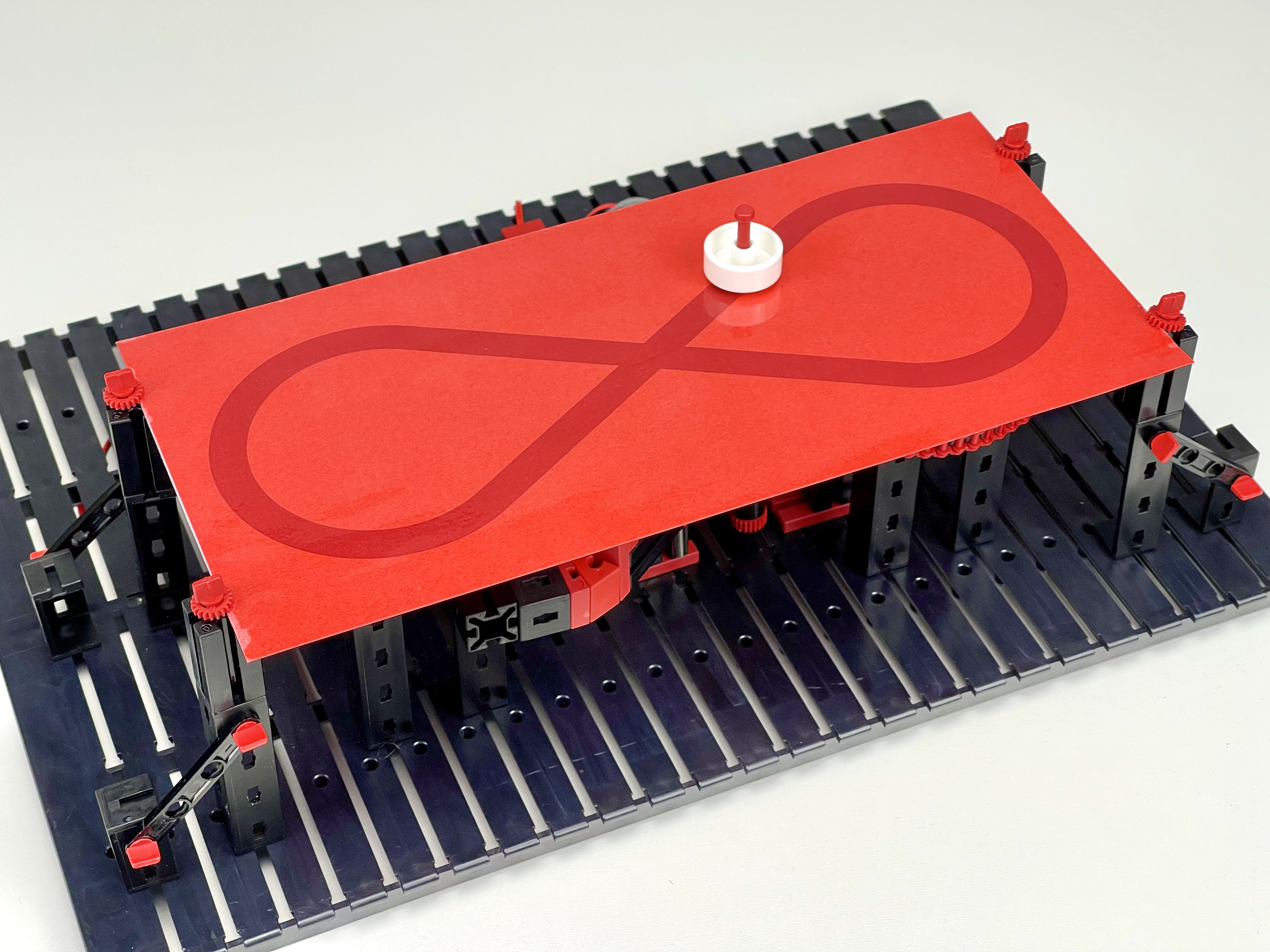
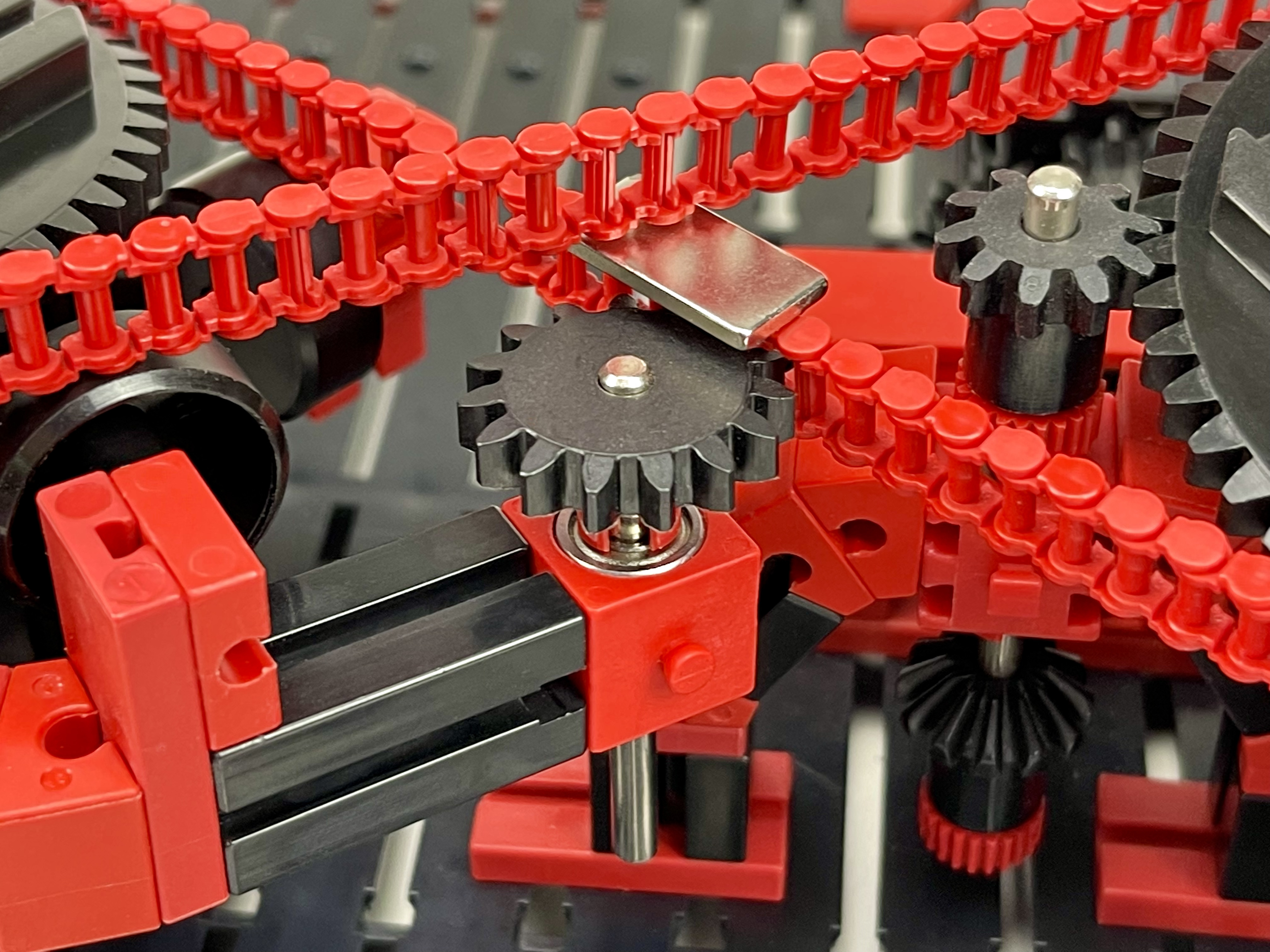
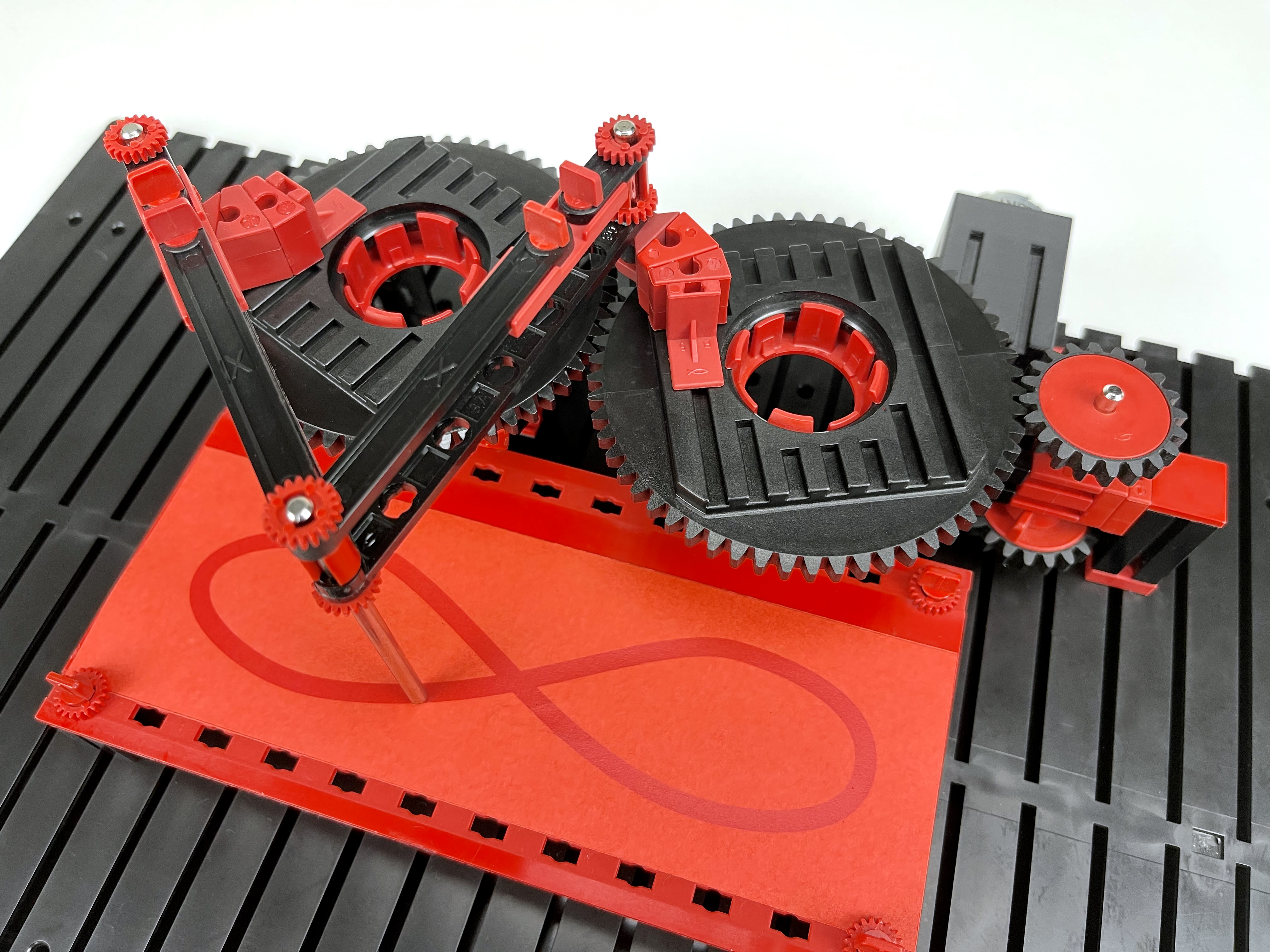
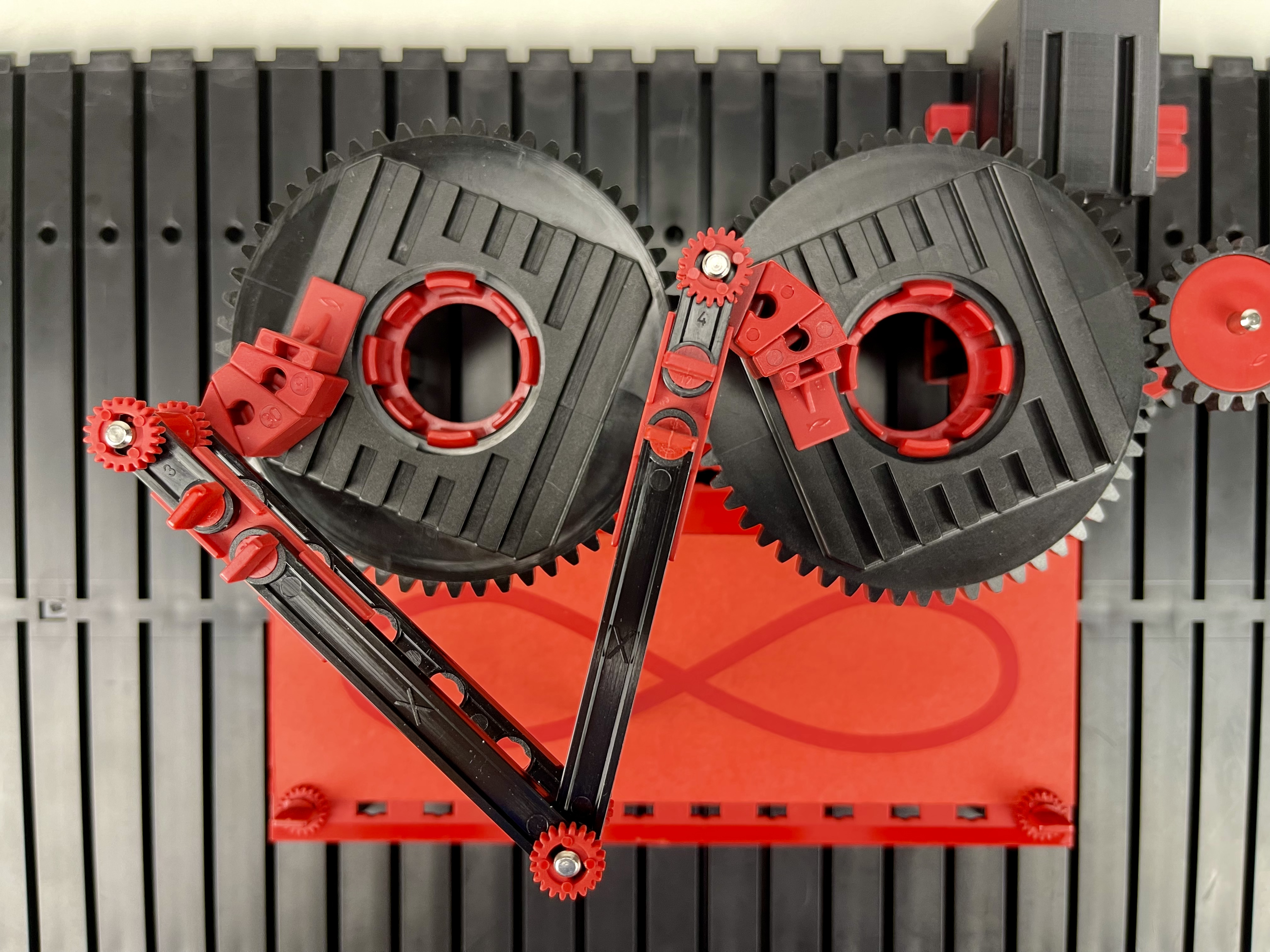
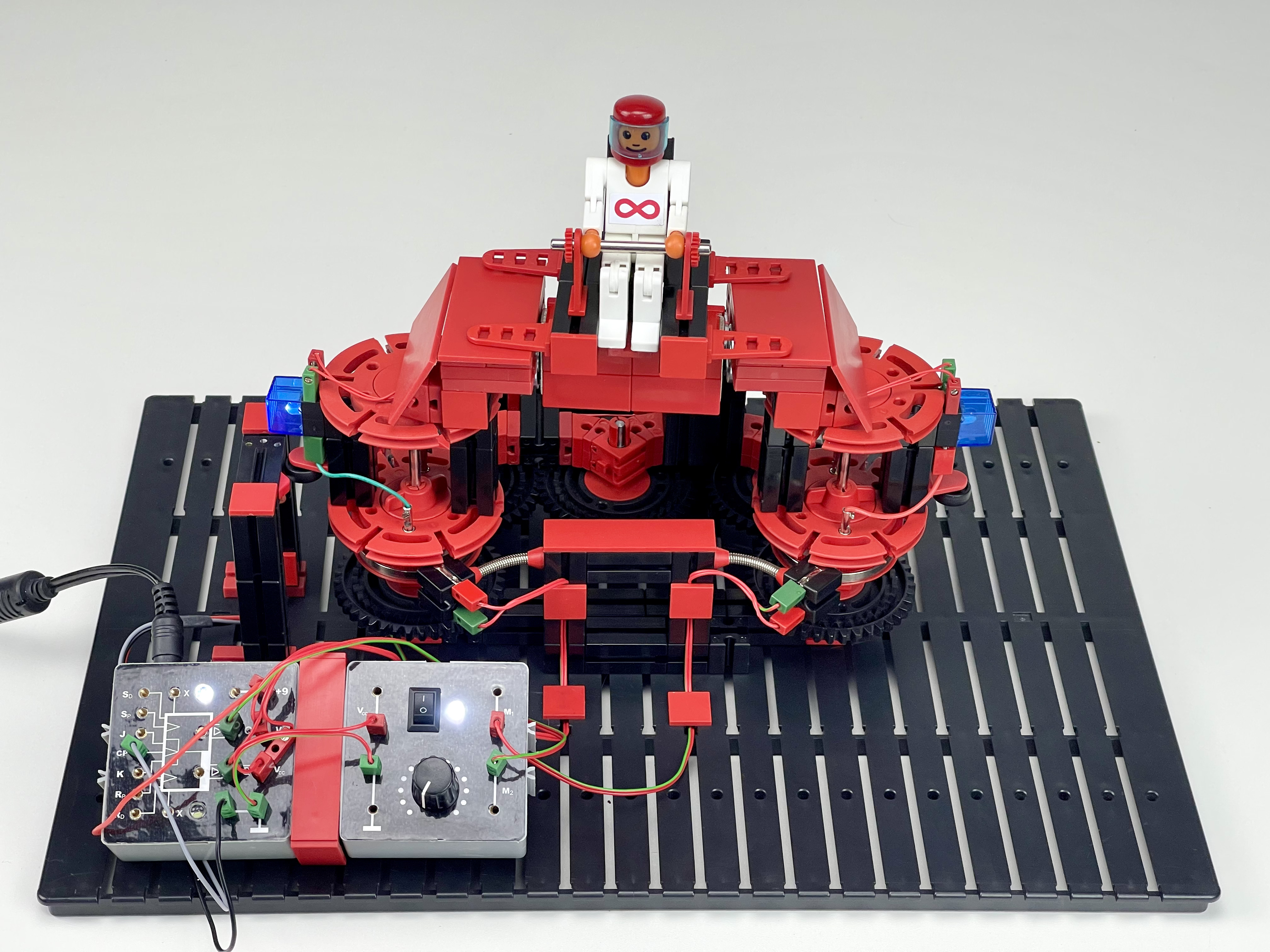
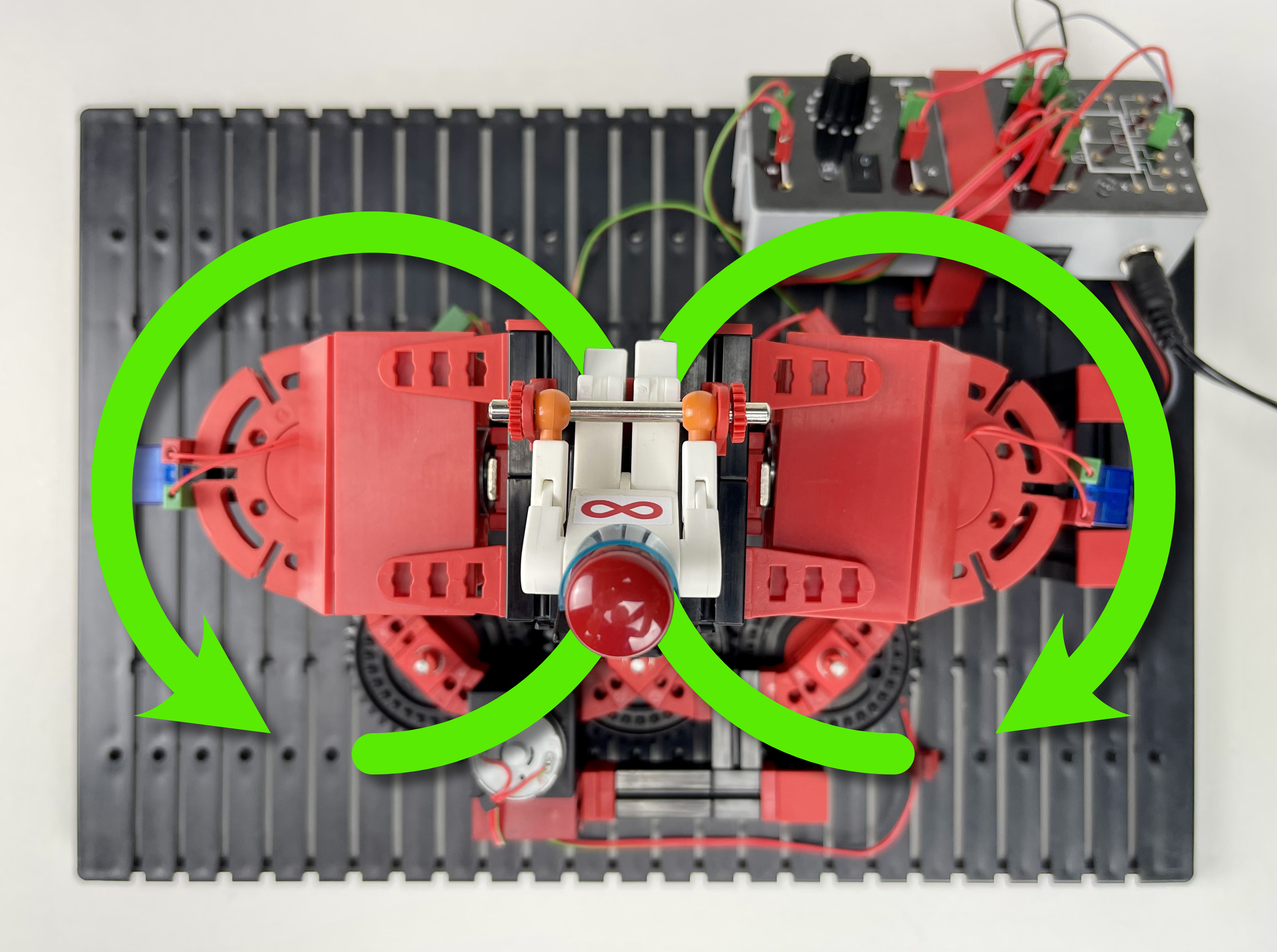
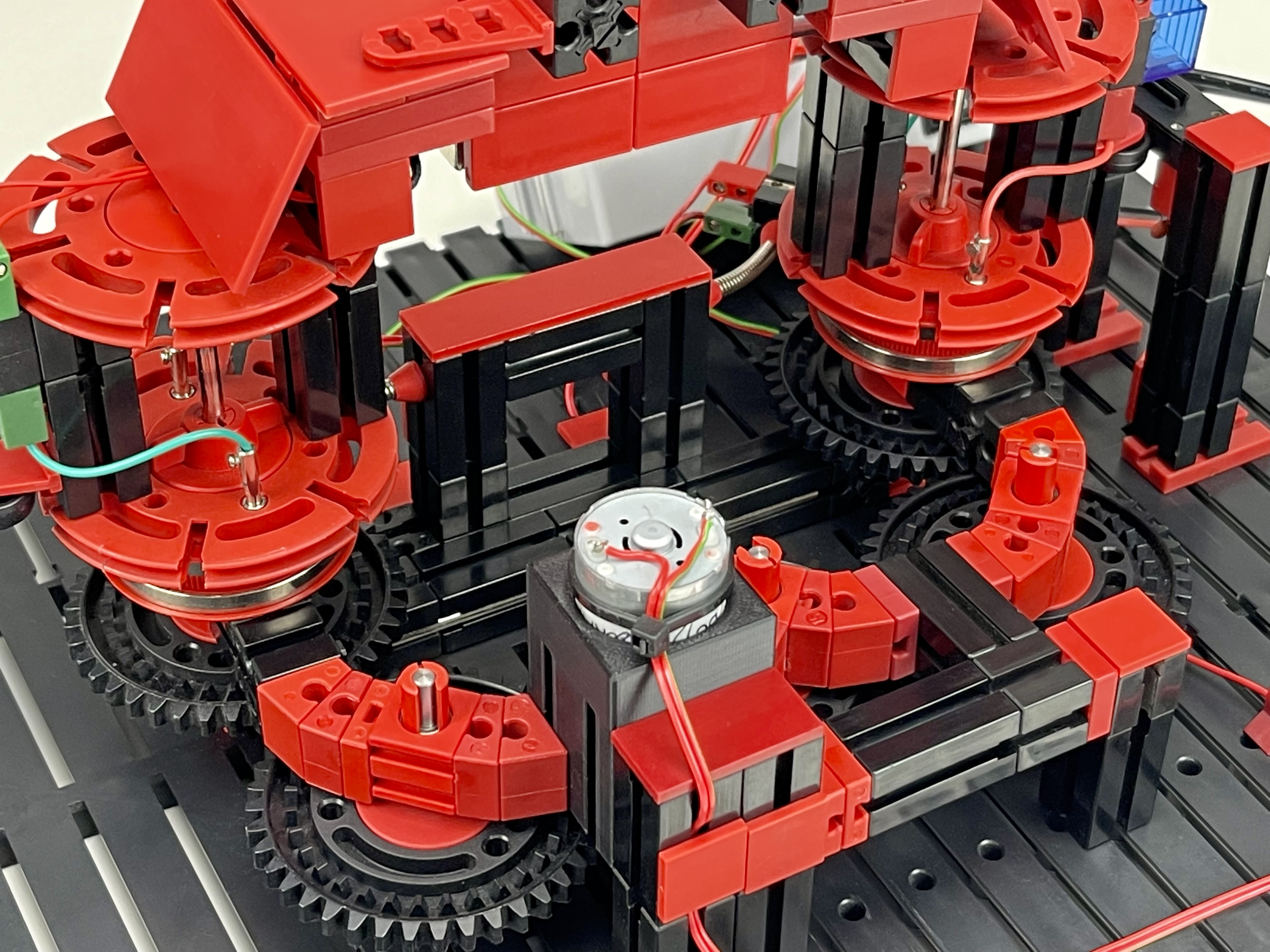
Enige tijd geleden dacht ik met een fischertechnik-clubgenoot mee over een model waarin een achtvormige beweging moest worden uitgevoerd. De uitdaging was om een element, zoals bijvoorbeeld een karretje of kogel, een pad volgens een 'strikvorm' of 'lemniscaat'-curve te laten beschrijven. Dit levert een beweging op die zichzelf in het middelpunt kruist.
Foto's
 |
 |
 |
||
 |
 |
 |
||
 |
 |
 |
 |
 |
|
Video's |
||||
|
|
||||